- Use o bom senso
- Seja educado. Trate os outros como você gostaria de ser tratado
- Você só pode usar até 3.000 caracteres por comentário
- Você não pode comentar o mesmo programa dentro do período de 60 segundos
- Você não pode postar o mesmo comentário em vários programas.
- Existe um limite de 100 comentários por usuário no período de 24 horas.
sombra para
de uno
|
v1 |
 0 | 0 |
 0 | 0 |
 5584 | 5584 |
 32 32
|
|
Acesse sua conta para comentar e baixar este programa.
 |
Compartilhado há 11 anos e 4 meses atrás
Alguns direitos reservados 
// sombra para.c - Criado pelo Studio UNO 2.11 // 14 December 2012 4:40:04 pm #include <uno.h> // Declaracao das Variaveis unsigned int sensor; //Funcao Principal void main(void) { __inicializa; __delay(1000); sensor = __analog_in(0); while(TRUE) { __motor_curso(__FORWARD); while((__analog_in(0) > (sensor + 100))) { __motor_curso(__STOP); } } while(TRUE) { } }
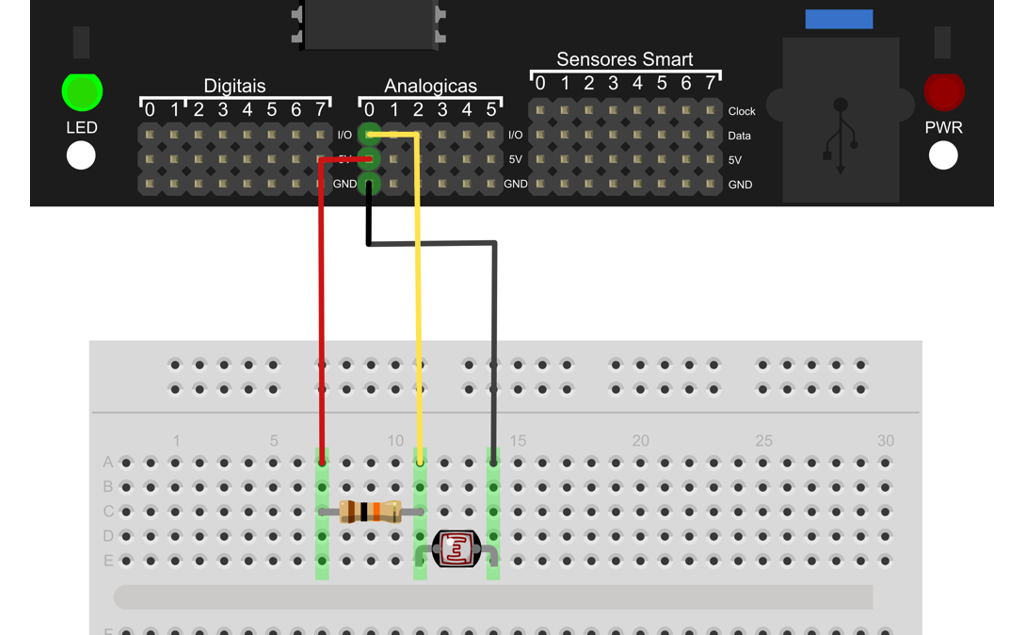
DescriçãoEste programa realiza uma calibração inicial do sensor e posteriormente aciona os motores para frente. Quando o sensor LDR conectado à porta analógica 0 detecta uma diminuição da luminosidade, o programa faz os motores pararem. Desta forma podemos parar o robô simplesmente desligando a luz ou colocando-se a mão sobre o sensor.Nenhum Comentário |
DownloadFavorito deProjetos de uno
|